|
23 |
新PMHF式の導出 IFUモデル編 (2) |
図1094.1にIF-SM1-SM2から構成されるサブシステムの状態遷移モデルを示します。
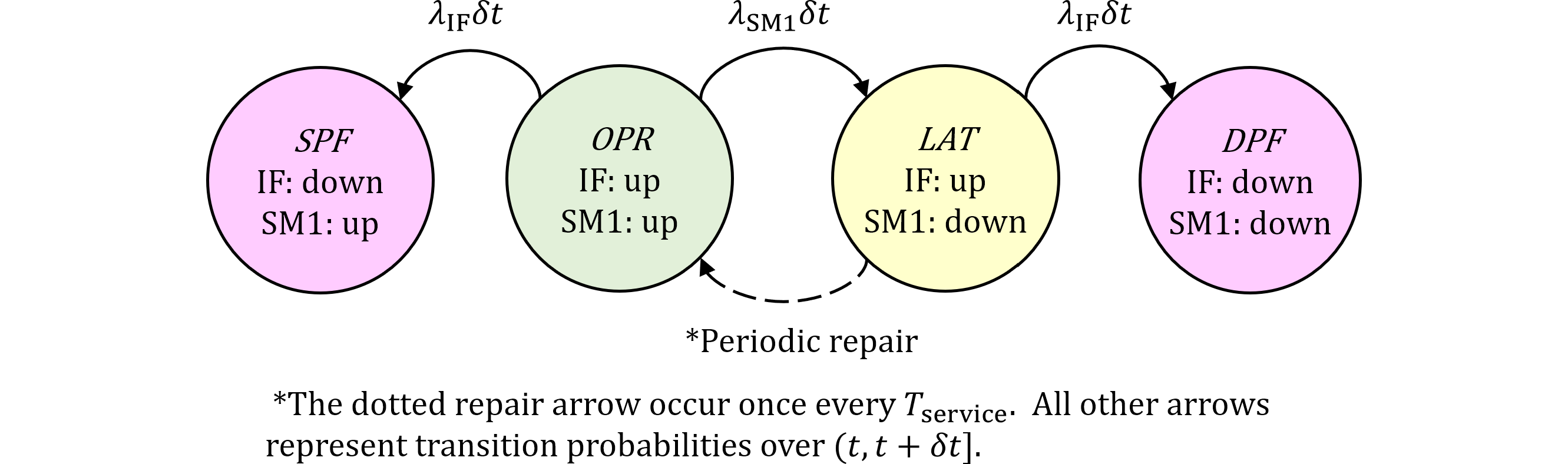
まず、微小時間間隔$[t, t+dt)$において初めてSPFによりVSGとなる場合を考えます。ここで、$F_\text{SPF}(t)$はSPF分岐による累積初回VSG確率を表すものとします。SPFは図1094.1においてOPR→SPFとなる場合です。ここで、IFの初回故障時刻を $\sigma_\text{IF}:=\inf\{s\ge0\mid \eta^\text{IF}_s\notin\mathcal{M}_\text{IF}\}$ とおきます。SPF分岐では、時刻$t$までIFが故障しておらず、時刻$t$でSM1が稼働中であり、区間$[t,t+dt)$でIFがSM1により防止できない故障集合$\mathcal{P}_\text{IF,SPF}$へ遷移します。 従って、IFとSMの故障は独立であること、及び条件つき確率の乗法定理を用いて
$$\img[-1.35em]{/images/withinseminar.png}$$
両辺を$dt$で割り、$dt\rightarrow0$の極限を取れば、
$$ f_\text{SPF}(t):=\frac{d}{dt}F_\text{SPF}(t)=A_\text{SM}(t)R_\text{IF}(t)\lambda_\text{IF,SPF} \tag{1094.2} $$
となります。さらに、通常の希事象近似ではIF自身の生存確率を$R_\text{IF}(t)\approx1$と置くため、
$$ f_\text{SPF}(t)\approx A_\text{SM}(t)\lambda_\text{IF,SPF} \tag{1094.3} $$
となります。ここで$A_\text{SM}(t)$は、OPR→SPF遷移に必要なSM1の稼働状態占有確率を表すため残します。一方、$R_\text{IF}(t)$は、IFが時刻$t$まで故障していないことを表す生存確率です。標準的なPMHF近似では、このIF自身の生存確率補正を1と置きます。
同様に初めてDPFによりVSGとなる場合を考えます。ここで、$F_\text{DPF}(t)$はDPF分岐による累積初回VSG確率を表すものとします。DPFは図1094.1においてLAT→DPFとなる場合です。この場合、時刻$t$でSM1は既に潜在故障状態にあり、IFはまだ故障していません。そのため、区間$[t,t+dt)$で後続のIF故障が発生するとDPFとなります。SM1は既に故障しているため、この後続IF故障は$\mathcal{P}_\text{IF,SPF}$ではなく、IF故障の全体集合$\mathcal{P}_\text{IF}$への遷移として扱います。
$$\img[-1.35em]{/images/withinseminar.png}$$
$\eta^\text{IF}_{t+dt}\in\mathcal{P}_\text{IF}$に注意します。SPFに遷移する場合は$\mathcal{P}_\text{IF,SPF}$への遷移を考えましたが、これはSM1が稼働している場合にSM1で防止できないIF故障だけがSPFとなるためです。一方、DPFに遷移する場合は既にSM1が潜在故障しているため、後続のIF故障はIF故障の全体集合$\mathcal{P}_\text{IF}$で扱います。
同様に両辺を$dt$で割り、$dt\rightarrow0$の極限を取れば、
$$ f_\text{DPF}(t):=\frac{d}{dt}F_\text{DPF}(t)=U_\text{SM}(t)R_\text{IF}(t)\lambda_\text{IF} \tag{1094.5} $$
となります。さらに、同じ希事象近似により$R_\text{IF}(t)\approx1$と置くため、
$$ f_\text{DPF}(t)\approx U_\text{SM}(t)\lambda_\text{IF} \tag{1094.6} $$
となります。
本稿はRAMS 2027に投稿予定であるため、重要な数式を一部秘匿しています。
