|
17 |
Point unavailability $Q(t)$ |
2025年の論文のテーマはQ(t)(Point unavailability)を考えていますが、論文を渉猟したところ、Cyclisation of Safety Diagnoses: Influence on the Evaluation of Fault Metricsというものを見つけました。これはPMHFの導出についていろいろなアプローチを検討しているものであり、非常に興味深い論文です。
ところが、最初のほうを見ていくと、
2.2 Failure Distribution Function
Random hardware faults of E/E systems are determined according to the exponential distribution. According to ISO 26262 these systems are non-repairable. Thereby the failure rate λ is considered as constant [7]. The unit of λ is Failure In Time (FIT) which is the number of failures in $10^9$ device-hours of operation. The related probability density function is:
(日本語訳)
2.2 故障分布関数
E/Eシステムのランダムなハードウェアフォールトは、指数分布に従って決定される。ISO 26262によると、これらのシステムは修復不可能である。そのため、故障率λは一定とみなされる[7]。λの単位はFIT(Failure In Time)であり、これは$10^9$デバイス稼働時間中の故障数である。関連する確率密度関数は:
既にここに誤りがあります。ISO 26262には明確に、修理の話が書かれています。例えば規格Part 10 8.3.2.3において、
Pattern 2
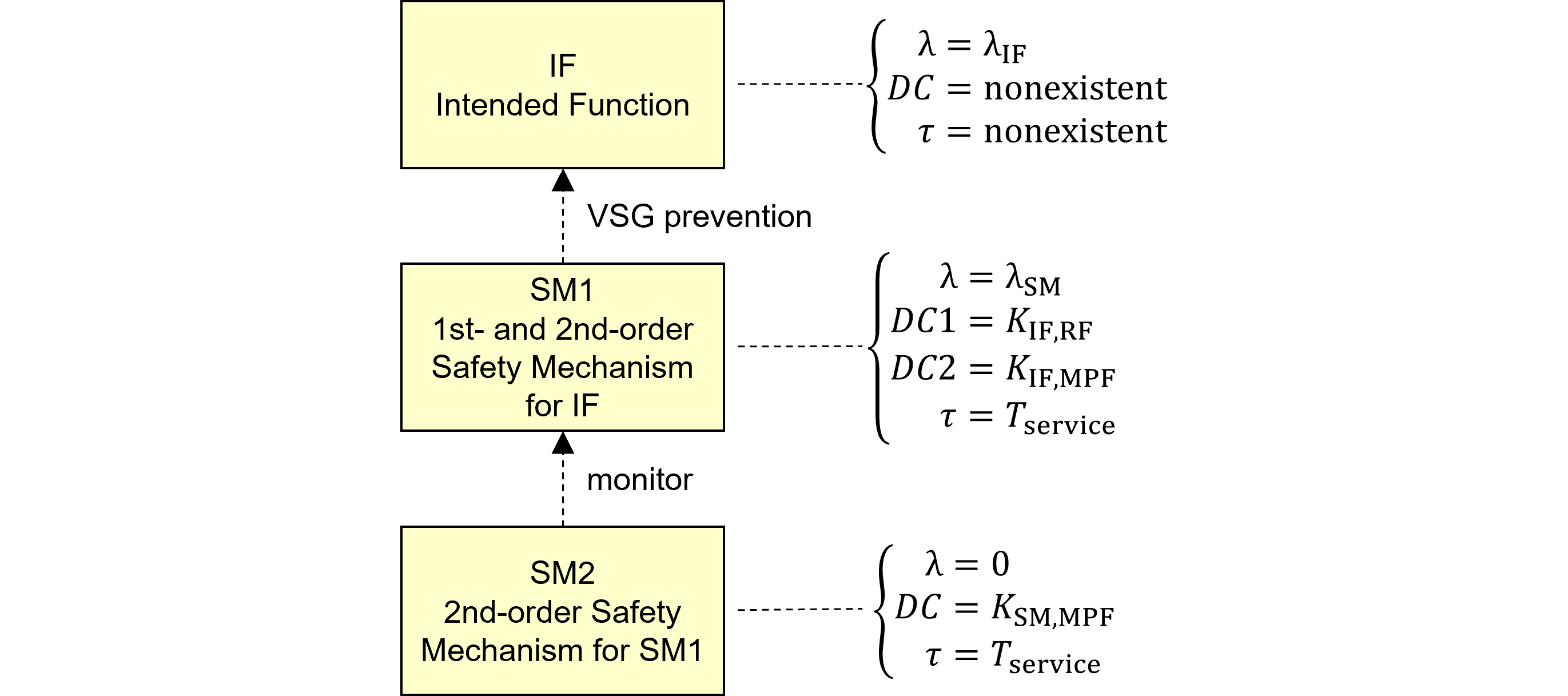
A fault in SM1 is mitigated and notified by SM2. The exposure duration of the fault is taken as the expected time required for the driver to take the vehicle in for repair.
(日本語訳)
パターン2
SM1のフォールトは SM2によって緩和され、通知される。フォールトの露出時間は、運転手が車両を修理に出すのに必要な予想時間とされる。
SM1が故障してその後に修理される、つまりSM1はrepairableであることを述べています。ダイレクトにSM1はrepairableと記述されていないため、分からなかったのかもしれません。
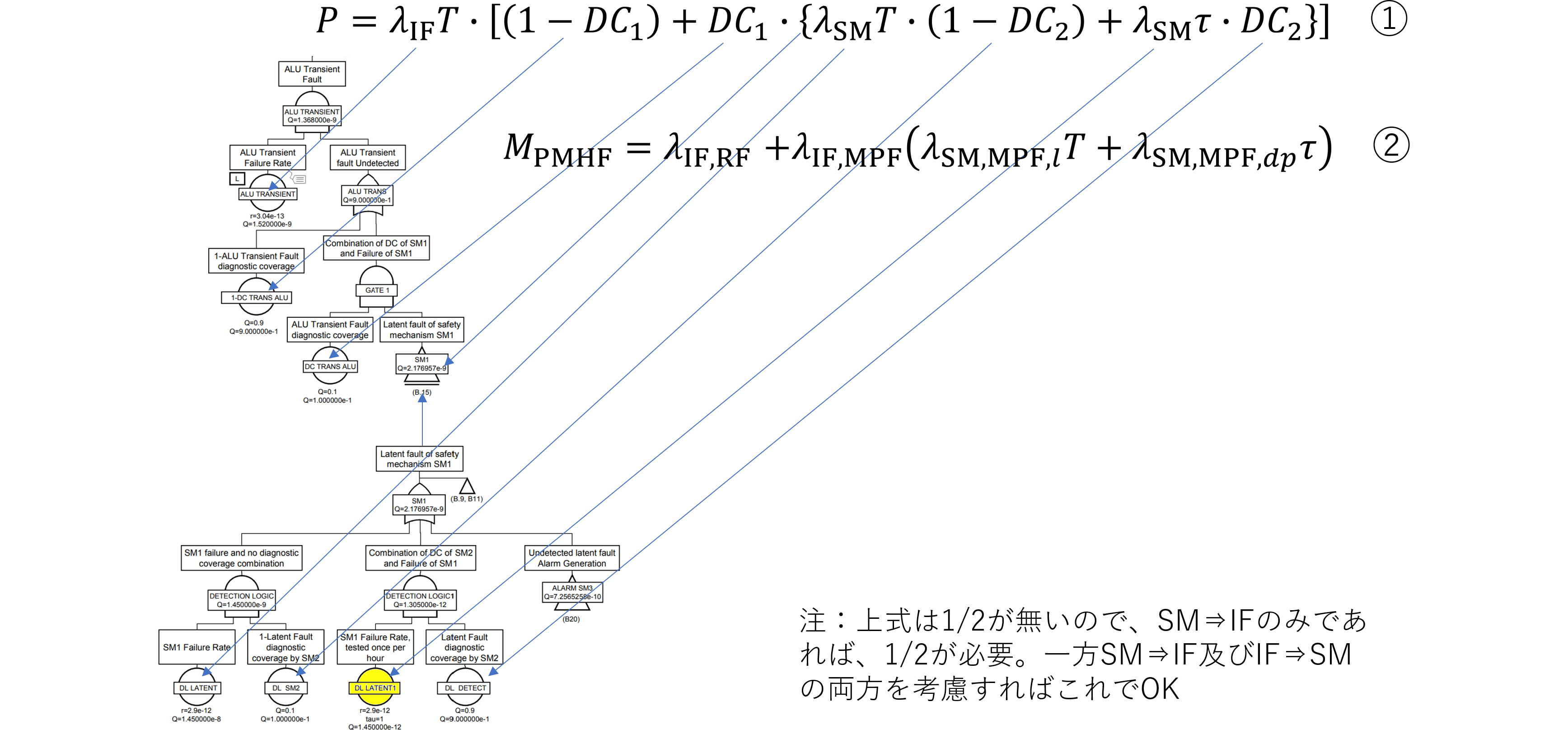
ここで述べられているパターン1~4はDPFのパターンです。上記パターン2は、故障順序はSM1⇒IFの順です。Pattern 2においてSM1のフォールトをSM2が検出できない場合LFになりますが、SM2はLF防止のためのSMです。Pattern 2ではSM2によりSM1のフォールトが防止され、ドライバーに通知され、ドライバーは車両を修理工場に運びます。
規格には修理工場の後の話が書かれていませんが、修理時間ゼロで修理される仮定となっています。このことは記述されていませんが、露出時間は修理工場搬入で終わることおよび、PMHFの公式から推定されるPMHF導出仮定のひとつです。